Pêndulos acoplados
Oscilações estão por toda a parte. Estão numa molécula que vibra, numa criança brincando num balanço, nos elétrons que se movimentam dentro do seu celular. A molécula, a criança e o elétron são exemplos de osciladores. Um outro exemplo de oscilador muito conhecido dos físicos é o pêndulo: um corpo preso a uma corda que é posto a oscilar.
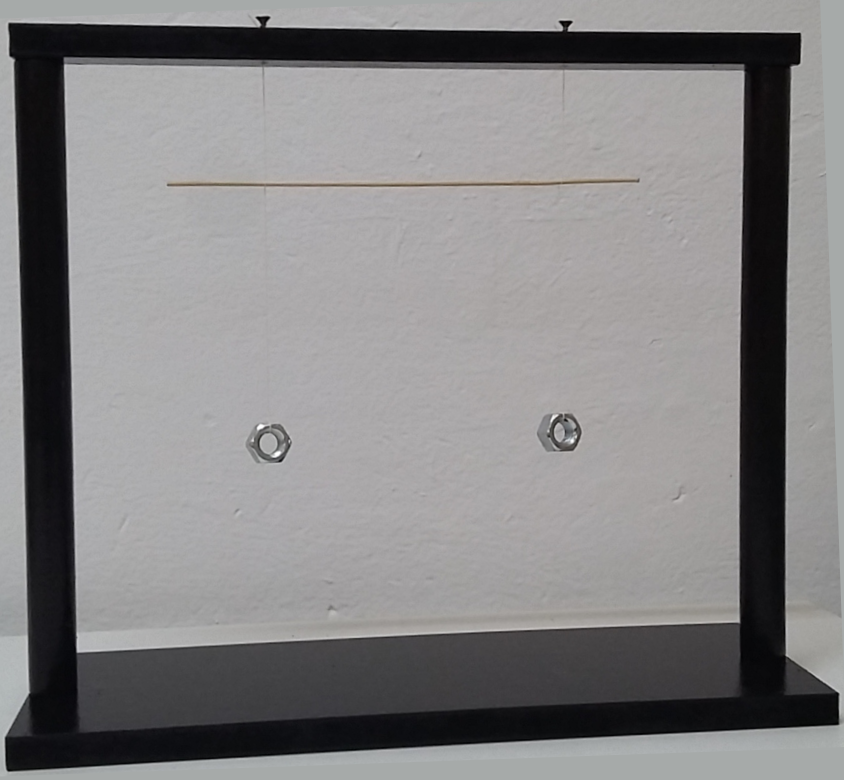
Muitas vezes, não temos apenas um oscilador oscilando no sistema. Temos vários, como a montagem mostrada na figura acima. Na montagem, temos dois pêndulos que podem oscilar. Além disso, as oscilações não são independentes, elas são acopladas. O acoplamento é produzido, neste caso, pela barra horizontal.
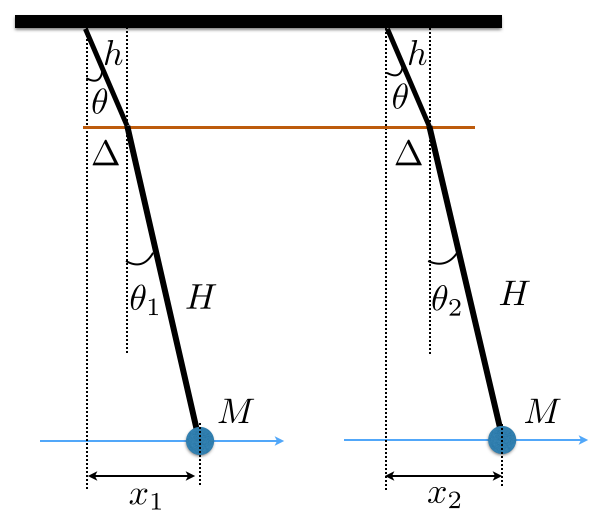
Faremos aqui uma análise do movimento de pêndulos acoplados. Para isso, usaremos um modelo para representar a montagem acima. O modelo é o da figura a seguir, onde tanto as cordas como a barra de acoplamento serão consideradas de massa desprezível quando comparadas a massa dos pêndulos (porcas, neste caso). Os comprimentos e ângulos relevantes para descrevermos o movimento estão indicados na figura. Localizaremos o pêndulo da esquerda pela variável \(x_1\) e o da direita pela variável \(x_2\), ambas medidas a partir do ponto onde os pêndulos estão em suas posições de equilíbrio.
O movimento de um único pêndulo para pequenas oscilações (neste caso, conhecido como pêndulo simples) é descrito pela equação diferencial
\[ \ddot{x} = -\frac{g}{H}x \]
onde \(g\) é a aceleração da gravidade, \(H\) é o comprimento do pêndulo e \(\displaystyle \ddot{x}\equiv \frac{d^2x}{dt^2}\). Essa equação é obtida a partir das forças que agem sobre o pêndulo.
Para o sistema com dois pêndulos, teremos o seguinte conjunto de 2 equações:
\[\displaystyle \left\{ \begin{array}{ccc} \ddot{x}_1 & = &\displaystyle -\frac{g}{H}(x_1 - \Delta(x_1,x_2) ) \\ \ddot{x} _2 & = &\displaystyle -\frac{g}{H}(x_2 - \Delta(x_1,x_2) ) \\ \end{array} \right. .\] onde \(\Delta(x_1,x_2)\) depende de \(x_1\) e \(x_2\) e representa matematicamente o acoplamento entre os pêndulos. As soluções das equações, isto é, \(x_1(t)\) e \(x_2(t)\) fornecerão o movimento de cada pêndulo. As duas equações acima são acopladas pois a solução da primeira é usada para construir a segunda e vice-versa. Portanto, vamos primeiramente desacoplá-las!
Para isso, vamos primeiramente subtrair uma equação da outra. Isso resulta em
\[ \displaystyle \ddot{x_1}-\ddot{x_2} = -\frac{g}{H}(x_1-x_2)\]
Se agora definirmos \(X_a\equiv x_1-x_2\), a equação acima pode ser reescrita como
\[ \displaystyle \ddot{X_a} = -\frac{g}{H}X_a\]
que é a oscilação de um pêndulo simples com frequência angular \(\displaystyle \omega_a=\sqrt{\frac{g}{H}}\).
Vamos tentar agora somar as equações. Isso resulta em
\[ \displaystyle \ddot{x_1}+\ddot{x_2} = -\frac{g}{H}(x_1+x_2-2\Delta).\]
Como estamos considerando pequenas amplitudes (pêndulo simples), podemos ainda considerar que \(\theta_1 \approx \theta_2 \approx \theta\), assim
\[ \displaystyle \frac{x_1}{H} \approx \frac{x_2}{H} \approx \frac{\Delta}{h}\]
e
\[ \displaystyle \frac{x_{1,2}-\Delta}{H} \approx \frac{x_{1,2}}{H+h} \]
e assim
\[ \displaystyle \ddot{x_1}+\ddot{x_2} = -\frac{g}{H+h}(x_1+x_2).\]
Definindo agora \(X_b\equiv x_1+x_2\), a equação acima pode ser reescrita como
\[ \displaystyle \ddot{X_b} = -\frac{g}{H+h}X_b\]
que é a oscilação de um pêndulo simples com frequência angular \(\displaystyle \omega_b=\sqrt{\frac{g}{H+h}}\), onde \(\omega_a>\omega_b\).
As equações para \(X_a\) e \(X_b\) são desacopladas e tem soluções da forma
\[ \displaystyle X_a = A\cos(\omega_a t+\delta_a)\]
\[ \displaystyle X_b = B\cos(\omega_b t+\delta_b),\]
onde \(A\), \(B\), \(\delta_a\) e \(\delta_b\) são constantes de integração que dependem das condições iniciais, isto é, de que posição e velocidade os pêndulos tem em \(t=0\).
Vamos considerar dois casos especiais das soluções acima.
\(A=0\rightarrow X_a=x_1-x_2=0\) ou ainda \(x_1=x_2=(B/2)\cos(\omega_b+\delta_b)\). Ou seja, os dois pêndulos oscilam com a mesma frequência \(\omega_b\) e com a mesma amplitute \(B/2\). Eles oscilam em fase. Este movimento, onde os osciladores tem a mesma frequência, é chamado de modo normal de oscilação. \(B=0\rightarrow X_b=x_1+x_2=0\) ou ainda \(x_1=-x_2=-(A/2)\cos(\omega_a+\delta_a)\). Ou seja, os dois pêndulos oscilam com a mesma frequência \(\omega_a\) mas agora com amplitudes opostas! Os dois pêndulos se aproximam e se afastam juntos. Este movimento é um outro modo normal de oscilação.
Para um caso geral, diferente dos dois apresentados acima, a solução será uma combinaçcão linear dos dois modos normais de oscilação. Por exemplo, se largarmos cada pêndulo a partir de ângulos diferentes ( \(\theta_1(0)\neq\theta_2(0)\) ), o movimento dos dois pêndulos envolverá ambos os modos normais, parecendo um movimento caótico.
Vamos analisar o caso onde \(x_1=X_0\), \(x_2=0\) e \(\dot{x}_1=\dot{x}_2=0\) (ou \(X_a=X_0\), \(X_b=X_0\) e \(\dot{X}_a=\dot{X}_b=0\) ). Para este caso, a solução do sistema de equações diferenciais acopladas é:
\[ \displaystyle x_1(t) =X_0 \cos \left( \frac{\omega_a-\omega_b}{2}t\right)\cos \left( \frac{\omega_a+\omega_b}{2}t\right) \]
\[ \displaystyle x_2(t) =X_0 \sin \left( \frac{\omega_a-\omega_b}{2}t\right)\sin \left( \frac{\omega_a+\omega_b}{2}t\right) \]
Os termos envolvendo $ _a-_b $ modulam a amplitude dos movimentos e correspondem ao que chamamos de batimento. A frequência de batimento \(f\) será portanto
\[\displaystyle f = \frac{\omega_a-\omega_b}{2\pi}=\frac{1}{2\pi}\sqrt{\frac{gh}{H(H+h)}}\]
e o período de batimento \(T=1/f\),
\[\displaystyle T = 2\pi\sqrt{\frac{H(H+h)}{gh}}.\]
O caso sem acoplamente ocorre quando \(h=0\) onde o movimento de um dos pêndulos não influencia o movimento do outro.
Use a animação a seguir (Autor Vitor Coluci) para ver como será o movimento dos pêndulos para diferentes valores de \(h\), a localização da barra de acoplamento. Notem que após um tempo de \(T/2\) de iniciado o movimento do pêndulo 1, toda a energia dele é transferida para o pêndulo 2 (a amplitude do pêndulo 1 é zero enquanto a do pêndulo 2 é máxima).
Para os curiosos
A montagem dos pêndulos acoplados por uma barra foi proposta originalmente por Priest e Poth em 1982 no trabalho Teaching Physics with coupled pendulums. A motivação deles foi um evento ocorrido durante um musical na escola onde trabalhavam!
Uma montagem semelhante àquela que estudamos aqui por ser vista no trabalho de Young-Ki Cho Teaching the Physics of a String-Coupled Pendulum Oscillator: Not Just for Seniors Anymore (2012).
Você sabia que pêndulos acoplados tem uma conexão com a física das partículas elementares? Pois é, veja neste vídeo (em inglês) de Martin Archer esta conexão !
Deixamos aqui uma pergunta: O que acontecerá com o movimento dos dois pêndulos se eles tiverem comprimentos diferentes ? Que tal construir esta configuração ?
Ficou curioso sobre a dependência de \(\Delta\) com \(x_1\) e \(x_2\) ? Aqui calculamos essa dependência usando a formulação Lagrangiana. Confira!